Permanent magnet linear synchronous motor (PMLSM) has become more prevalent in high-end manufacturing equipment owning to its high efficiency, fast transient response, high thrust density, and so on.
A tremendous amount of advanced control strategies, including active disturbance rejection control, modelbased predictive control (MPC), and two degrees of freedom current control, have been developed for a high-performance PMLSM drive. Initially applied in the area of the process industry, MPC has become one of the hottest topics for motor drive control at present. MPCs deployed in energy conversion systems involve finite control set MPC (FCS-MPC), and continuous control set MPC (CCS-MPC).
In a study published in IEEE Transactions on Industrial Electronics, Prof. WANG Fengxiang’s group from Fujian Institute of Research on the Structure of Matter, Chinese Academy of Sciences, proposed an adaptive model predictive current control (AM-MPCC) to solve the parameter dependence problem of CCS-MPC-based current control (CCS-MPCC).
Equipped with a modulator, CCS-MPC produces a constant switching frequency and has a lower current ripple than FCS-MPC. Since the online numerical optimization algorithms are generally very complicated, the calculation burden increases significantly when the input variables of CCS-MPC are optimized online.
The researchers proposed the CCS-MPCs without the requirement of online calculation to decrease the difficulty of controller implementation. They expressed the CCS-MPC solution as an explicit function of the system state by solving the optimization problem offline. While the CCS-MPC approach obtains a small current ripple, low computational cost, and fast transient response, it is vulnerable to inevitable parameter variations in real applications.
Besides, they proposed a robust current-control scheme by introducing the steepest descent method-based adaptive disturbance observer. Although the Luenberger observer is extensively used for its intuitive structure and simple implementation, it can not precisely observe the system state if the parameter varies rapidly. Nevertheless, sliding mode observers deployed in digital controllers produce a serious chattering noise.
Benefiting from the compensated predictive model, DO-MPC has an advantage over conventional CCS-MPC in robustness against parameter mismatches and external perturbation. However, the bandwidth of the DO-MPC controller can not be immune to inductance variations.
Experiments have been carried out on a Zynq-based hardware prototype, and the experimental results validated that the proposed method is superior to CCS-MPCC and DPCC+ASCDO in the robustness against parameter mismatches.
Furthermore, the researchers evaluated the proposed AM-MPCC on a Zynq-based hardware prototype finally. They utilized the proposed AM-MPCC strategy to substitute CCS-MPCC to gain better parameter robustness, provided the Id, Iq , Vdc, and Vqc for the coefficient optimizer to generate Λd and Λq, and fed the optimized Λd and Λq into DSMDO to estimate the parameter mismatches fd and fq.
This study prompts the robustness against PM lux, electrical inductance, and electrical resistance variations.
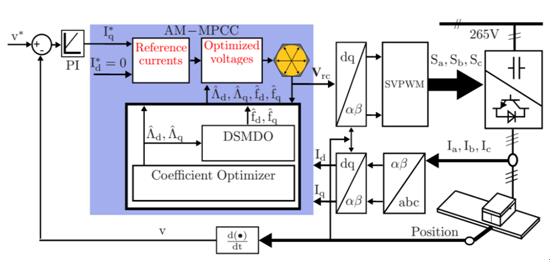
Illustration of the Research (Image by Prof. WANG’s group)
Contact:
Prof. WANG Fengxiang
Fujian Institute of Research on the Structure of Matter
Chinese Academy of Sciences
Email: Fengxiang.Wang@fjirsm.ac.cn