Permanent magnet synchronous motor(PMSM) has been widely used in the industrial field due to its high power density and high efficiency. With the development of semiconductor technology, digital control systems are applied to improve the PMSM system's performance. Proportional integral control, as a straightforward and effective control method, has been implemented on the Microprocessors to manipulate PMSM systems.
However, PMSM is a nonlinear system with variable parameters, which means that the linear Proportional Integral (PI) controller is unable to give full play to the performance of a PMSM system. Therefore, a number of modern control strategies, including model-based predictive control, sliding mode control, and internal model control, have been proposed for PMSM systems.
In a study published in IEEE TRANSACTIONS ON ENERGY CONVERSION, Dr. WANG Fengxiang’s group from Fujian Institute of Research on the Structure of Matter of the Chinese Academy of Sciences has proposed a sliding mode gradient descent disturbance observer-based adaptive reaching law sliding mode predictive speed control (GD-SMPC+ARL) to prompt the robustness and tracking performances of surfacemounted permanent magnet synchronous motor (SPMSM) systems.
The researchers found that continuous control set model-based predictive control (CCS-MPC) has an advantage over finite control set MPC (FCS-MPC) by reducing the velocity and current ripple, it is more sensitive against parameter uncertainties and external disturbances. Sliding mode control(SMC) is one of the well-known variable-structure systems and has been extensively applied in industrial applications owing to its robustness against parameter mismatches and external disturbances.
By introducing the predefined sliding mode reaching law into the cost function of CCS-MPC, the dynamic property of the MPC system can be controlled. However, the chattering phenomenon is drawn into CCS-MPC due to the discontinuous signum function.
The researchers proposed an SPMSM model with disturbance by representing the lumped disturbance as the q-axis current's coefficient.
Besides, they devised a sliding mode gradient descent disturbance observer (SM-GDDO) by introducing a sliding mode term into the gradient descent disturbance observer (GDDO). As a consequence, the SPMSM model uncertainties are compensated by SM-GDDO at each sampling period. An adaptive reaching law is also designed to accelerate the convergence rate and reduce the chattering level simultaneously.
On the basis of the proposed predictive model and estimated disturbance term, the researchers defined the cost function of GD-SMPC+ARL by employing the adaptive reaching law and a linear predictive sliding surface. The current constraint is considered when applying the optimized control input for each control period.
The researchers carried out experiments on a Zynq-based hardware prototype, and the experimental results validate that the proposed method is superior to sliding mode predictive speed control(SMPSC) and extended state sliding mode observer based sliding mode control(SMC+ESMDO) in tracking performance, load disturbance performance, and parameter robustness.
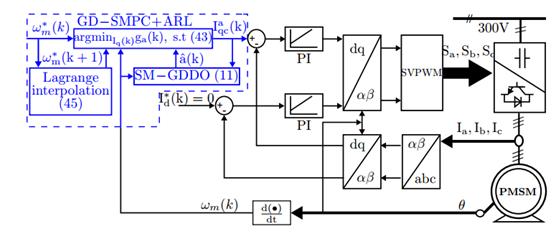
Illustration of the Research(Image by Dr. WANG’s group)
Contact:
Dr. WANG Fengxiang 
Fujian Institute of Research on the Structure of Matter
Chinese Academy of Sciences
Email: Fengxiang.Wang@fjirsm.ac.cn