Traditional model predictive control (MPC) strategies on the motor driving system cannot fully meet the requirements in this realm. As the third generation of advanced control technology, its potential should be further tapped to obtain excellent control performance.
For the common MPC, the control objective quality is limited due to its limited processor resources and heavy dependence on the coefficients of horizons and weighting factors, and the application in the high-end manufacturing field is restricted. A reasonable distribution scheme for the resources is important to tradeoff system stability, current quality and calculation burdens.
In a study published in IEEE Transactions on Industrial Electronics, Prof. WANG Fengxiang’s group from Fujian Institute of Research on the Structure of Matter of the Chinese Academy of Sciences designed a multistep predictive current control strategy with adaptive horizons for electrical drives to realize better comprehensive control performances, such as prediction accuracy, calculation burden and objective importance by fully utilizing the limited processor resources.
The researchers first analyzed the development of the objective functions with different types of long prediction horizons and vector selections, and verified the necessity of a group of suitable weighting factors in MPC. Through many repetitive prediction processes, the state variables are predicted to a future sampling period larger than one, and a group of weighting factors converging to zero is selected to reduce the suboptimal possibility and improve the converging rate.
Although the stability during the transient states can be improved by increasing the prediction horizon to ensure convergence, the issues of calculation burden and prediction error become serious. The researchers found that these issues can be effectively solved by the flexible control horizon and weighting factor. To realize this function, the operating states are divided into three types and determined by a hysteresis logic to correct the signal of the horizons’ changing steps. An adaptive logic is generated to obtain online adjusted horizons and to achieve a good control law according to the current operating state and accumulated speed errors.
The researchers made the best of the overtime scale to obtain an optimal weighting factor by the designed real-time branch and bound algorithm, and this value is applied in the system at the end of the control horizon to tune the importance of the objectives. The possibilities for the overtimescale are all listed to sufficiently utilized the restricted processor resources, and this term becomes a potential optimization.
Besides, the researchers selected a permanent magnet synchronous motor (PMSM) speed control system as an example to demonstrate the effectiveness of the presented control strategy. According to the simulation and experimental results, the presented control strategy obtains improved current impact, quality and tolerances compared to the conventional predictive controls under the same operating conditions. The presented method has enough compatibility to be applied to other motor driving systems to realize better control performances.
This study provides an essential guidance for the future design and synthesis of predictive control with long horizons for the motor driving system.
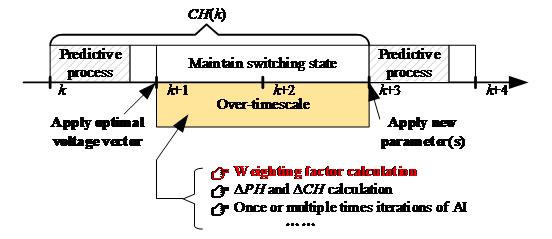
Illustration of the Research(Image by Prof. WANG’s group)
Contact:
Prof. WANG Fengxiang
Fujian Institute of Research on the Structure of Matter
Chinese Academy of Sciences
Email: fengxiang.wang@fjirsm.ac.cn