An occlusion-free solution based on the magnetic tracking technique was recently introduced for the self-charging docking of mobile robots, with the superiorities of low cost, ease of use, and robustness.
As the geomagnetic vector degrades the permanent magnet(PM)-based magnetic tracking performance, a real-time geomagnetic-vector-separation method is presented to estimate the PM pose and geomagnetic vector simultaneously.
In a study published in IEEE Transactions on Intelligent Transportation Systems, Prof. DAI Houde’s group from Fujian Institute of Research on the Structure of Matter of the Chinese Academy of Sciences carried out a docking experiment for self-charging mobile robots based on the proposed magnetic tracking technique.
The researchers investigated Magnetic tracking with real-time geomagnetic vector separation for robotic dockable charging. They accurately modelled the environmental magnetic field as the combined fields of the PM, earth, and disturbance sources. Then they transformed the Environmental Magnetic Field(EMF) model into another form consisting of the PM field, uniform disturbance field, and non-uniform disturbance field. For the uniform disturbance field, it was combined with the PM pose as unknown parameters to be estimated. For the non-uniform disturbance field, a robust kernel function was employed to reduce its influence on positioning performance. Finally, based on the EMF model, the PM pose and geomagnetic vector were simultaneously estimated by optimization algorithms.
In the part of dockable charging, the magnetic tracking system based on the proposed method could hold excellent stability in the whole movement process (standard deviations in X-, Y -, and Z-axes: 0.2 mm, 0.16 mm, 0.15 mm). The performance of the proposed method is significantly superior to the Inertial Measurement Unit(IMU)-based method (standard deviations in X-, Y -, and Z-axes: 2.13 mm, 1.74 mm, 3.06 mm).
Besides, the proposed magnetic tracking method with real-time geomagnetic-vector separation could achieve high repeat positioning accuracy for the self-charging docking of mobile robots. The proposed magnetic tracking method could be utilized for indoor positioning based on geomagnetic fingerprints, as the geomagnetic vector can be acquired in real-time.
This study provides a method which could be employed in high-precision parking, material distribution, and even the alignment for wireless charging of electric vehicles.
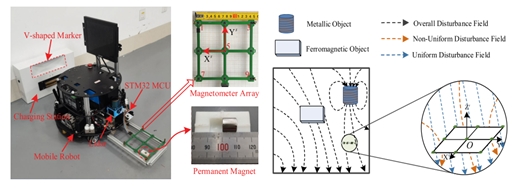
Illustration of the Research (Image by Dr. DAI’s group)
Contact:
Prof. DAI Houde
Fujian Institute of Research on the Structure of Matter
Chinese Academy of Sciences
Email: dhd@fjirsm.ac.cn